banner
banner


F1Tenth Autonomous Racing
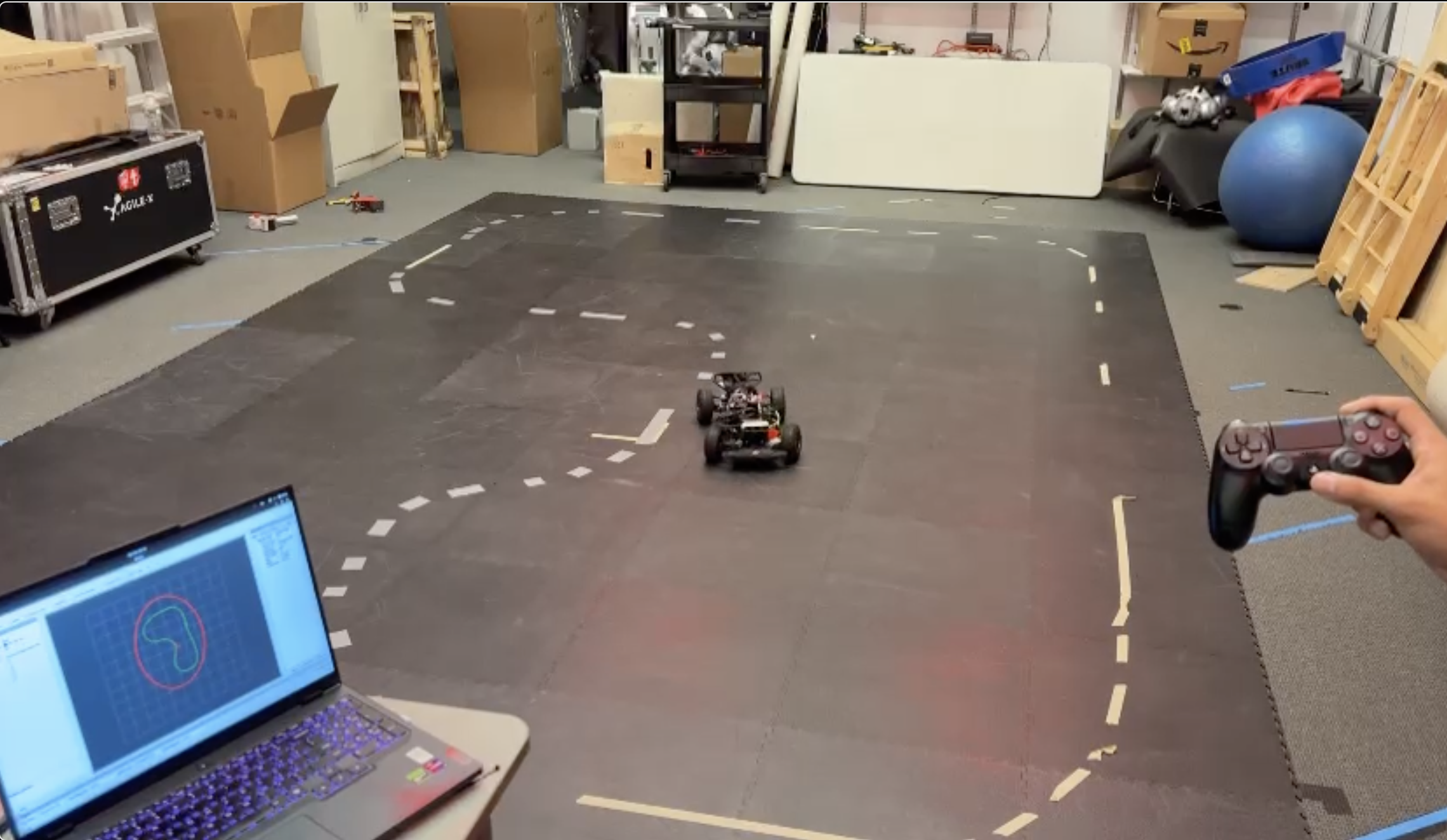
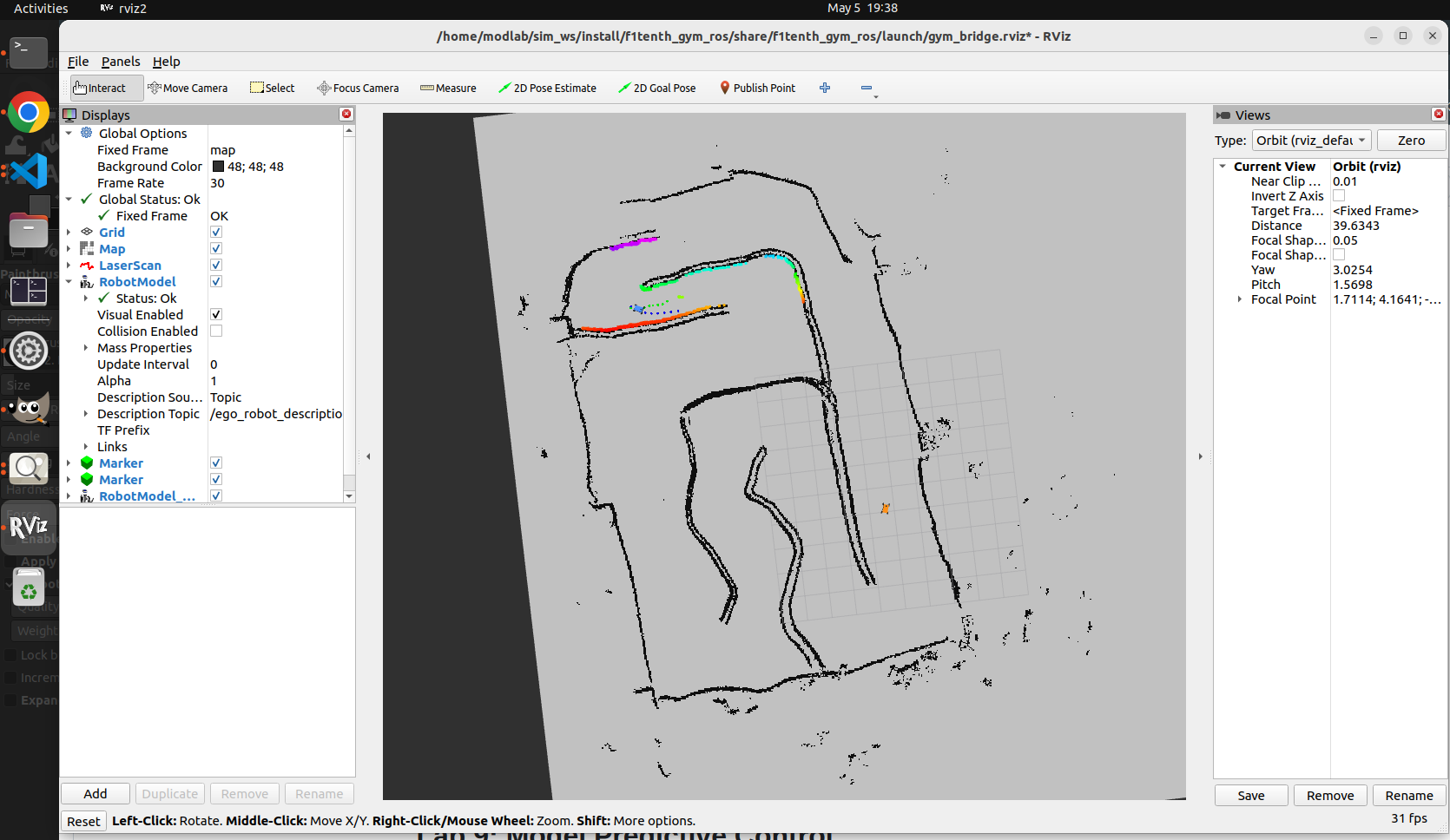
As part of the ESE 6150: Autonomous Racing course at Penn (a part of RoboRacer), I developed and implemented planning, perception, and control algorithms for a 1/10th scale autonomous race car using ROS2 in Python. My work included implementing wall following, pure pursuit, SLAM, RRT-based obstacle avoidance, and model predictive control (MPC) algorithms. I tested all systems in simulation using RViz and the F1TENTH Gym, and deployed them onto a physical race car for real-world validation. For the final race, we used my control architecture: an MPC controller tracking an optimally generated trajectory, with dynamic switching to a "follow-the-gap" reactive method to safely avoid other vehicles on the track. I additionally raced for the University of Pennsylvania at the 24th RoboRacer Competition at ICRA 2025.